
プロフィール
Profile
| 氏名 | 金田 徹 |
| 職位 | 教授 |
| メール | kanada* *=@kanto-gakuin.ac.jp |
| 担当科目 | 3D-CAD演習、3D-CAE演習、計測工学、メカトロニクス、メカトロニクス演習、機械実験Ⅱ、プロジェクトⅠ・Ⅱ 他 |
| 専門分野 | 精密計測/設計工学/教育工学 |
| 所属 研究室名 | 計測制御研究室 |
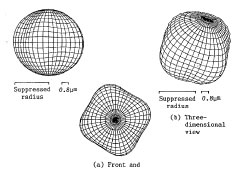
| 研究 テーマ | 球面形状誤差の超精密測定システムによる測定と評価、競技系ロボットシステムの設計開発 他 |
研究室の概要
Outline
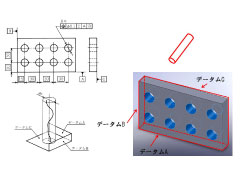
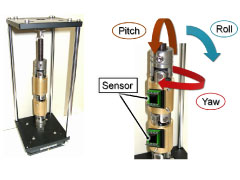
超精密形状測定・メカトロニクスシステム設計開発(精密形状測定システム・医療機器など)・ロボット制御・規格(JIS/ISO)開発と普及。
研究の一例
research
ヒーリング効果向上のための犬型ロボットの動作制御とその評価
高度化された見た目も可愛いロボットが、人間に対する癒し効果、ストレス解消、健康増進を与えることが臨床医学的にも検証されています。ここでは、犬型ロボットのAI化を進展させ、ヒーリング効果の高い動作制御の実現を取り組みます。
関連リンク
Link
お問い合わせ
Contact
当コースへの連絡と受験に関するお問い合わせは別の窓口となっておりますのでご注意ください。
横浜・金沢八景キャンパス
庶務課
受験について
アドミッションズセンター